About ALVN
ALVN was developed as a final year project for the SETU Software Development course. It is a system for a vehicle to autonomously avoid obstacles detect and navigate a guideline, using image processing and LiDAR spatial mapping.
How it Works
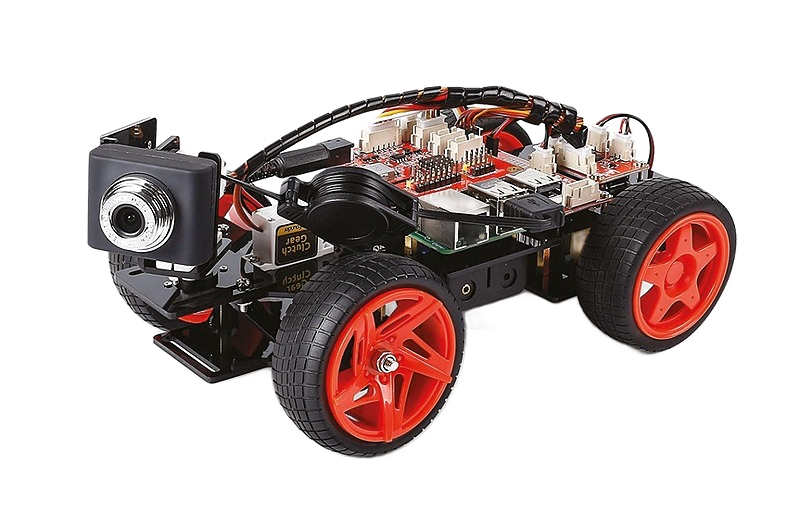
ALVN uses a Raspberry Pi and a Sunfounder PiCar-V kit, equipped with a Slamtec RPLidar A2M8 sensor. The system is programmed using Python and uses the Sunfounder PiCar-V SDK and RPLidar python library to interface with the hardware components.
-
Obstacle Avoidance
ALVN features an obstacle avoidance system that uses LiDAR spatial mapping to detect and avoid obstacles in the vehicle's path.
-
Path Following and Lane Following
The ALVN system offers two modes for navigation. Path Following mode allows the vehicle to follow a single line and maintain its position as close as possible to it. Lane Following mode is designed for the vehicle to travel forward and maintain its position between two lane lines.